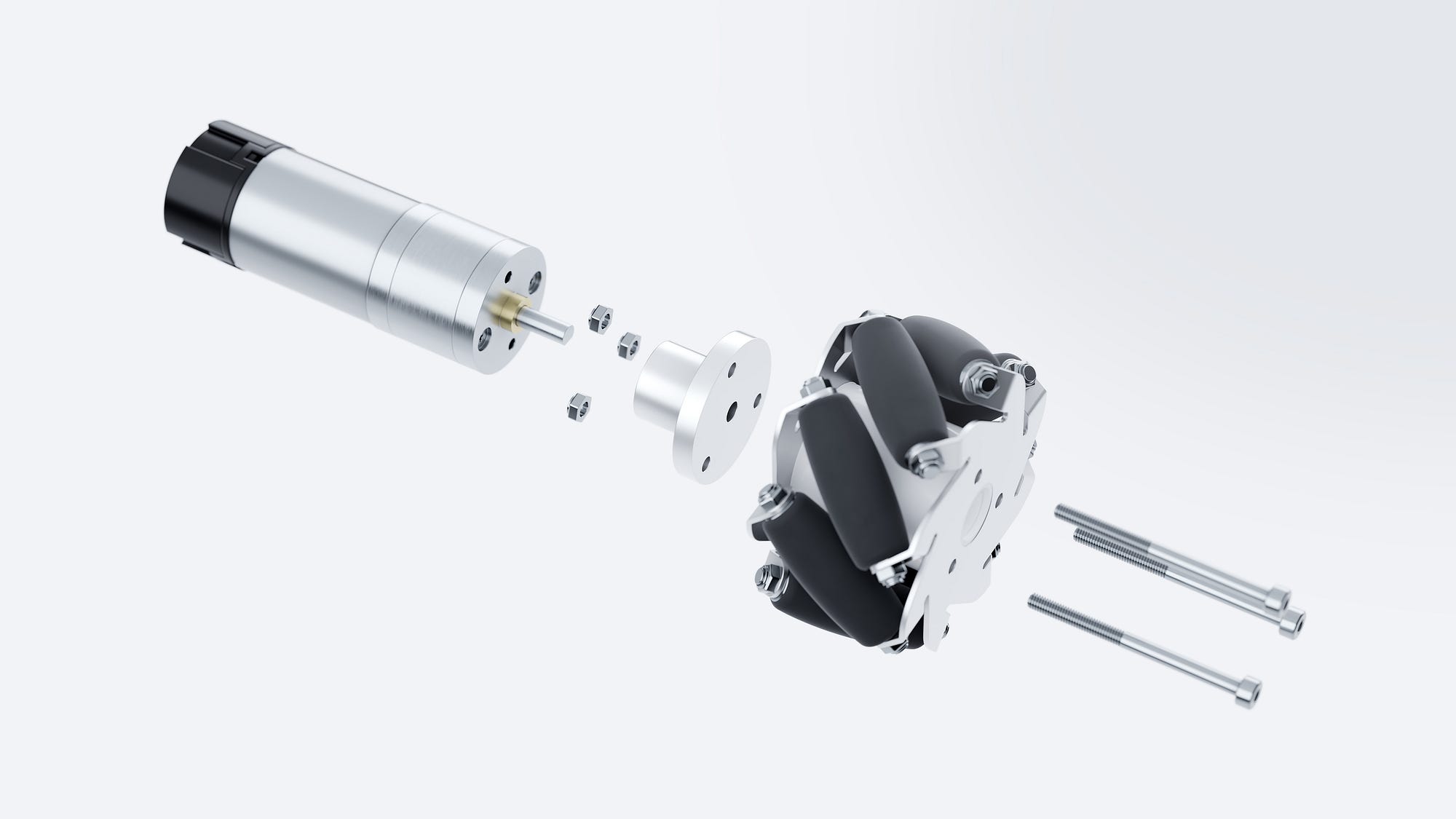
Designing a Mobile Robot. Building a Mobile Robot — From Scratch…, by Johan Schwind
4.5 (572) · € 34.00 · Auf Lager

Lentin joseph learning robotics using python design, simulate, program, and prototype an autonomous mobile robot using ros, open-cv, pcl, and python (2018, packt publishing)
JOHAN SCHWIND

Considerations for calculating the linear velocity of the robot wheels.

Review on mobile robots that exploit resonance - Johan K Schonebaum, Farbod Alijani, Giuseppe Radaelli, 2021

Teleoperation methods and enhancement techniques for mobile robots: A comprehensive survey - ScienceDirect

Designing a Mobile Robot. Building a Mobile Robot — From Scratch…, by Johan Schwind

Lentin joseph learning robotics using python design, simulate, program, and prototype an autonomous mobile robot using ros, open-cv, pcl, and python (2018, packt publishing)
Localization and path tracking control of a mobile robot.

Simulation model of mobile robot with 1-DOF manipulator.

Autonomous mobile robot workers.
PDF) Navigation of mobile robot using Global Positioning System (GPS) and obstacle avoidance system with commanded loop daisy chaining application method
Lentin joseph learning robotics using python design, simulate, program, and prototype an autonomous mobile robot using ros, open-cv, pcl, and python (2018, packt publishing)

HapticBots: Distributed Encountered-type Haptics for VR with Multiple Shape-changing Mobile Robots